



Robótica
Redação do Site Inovação Tecnológica – 21/05/2026
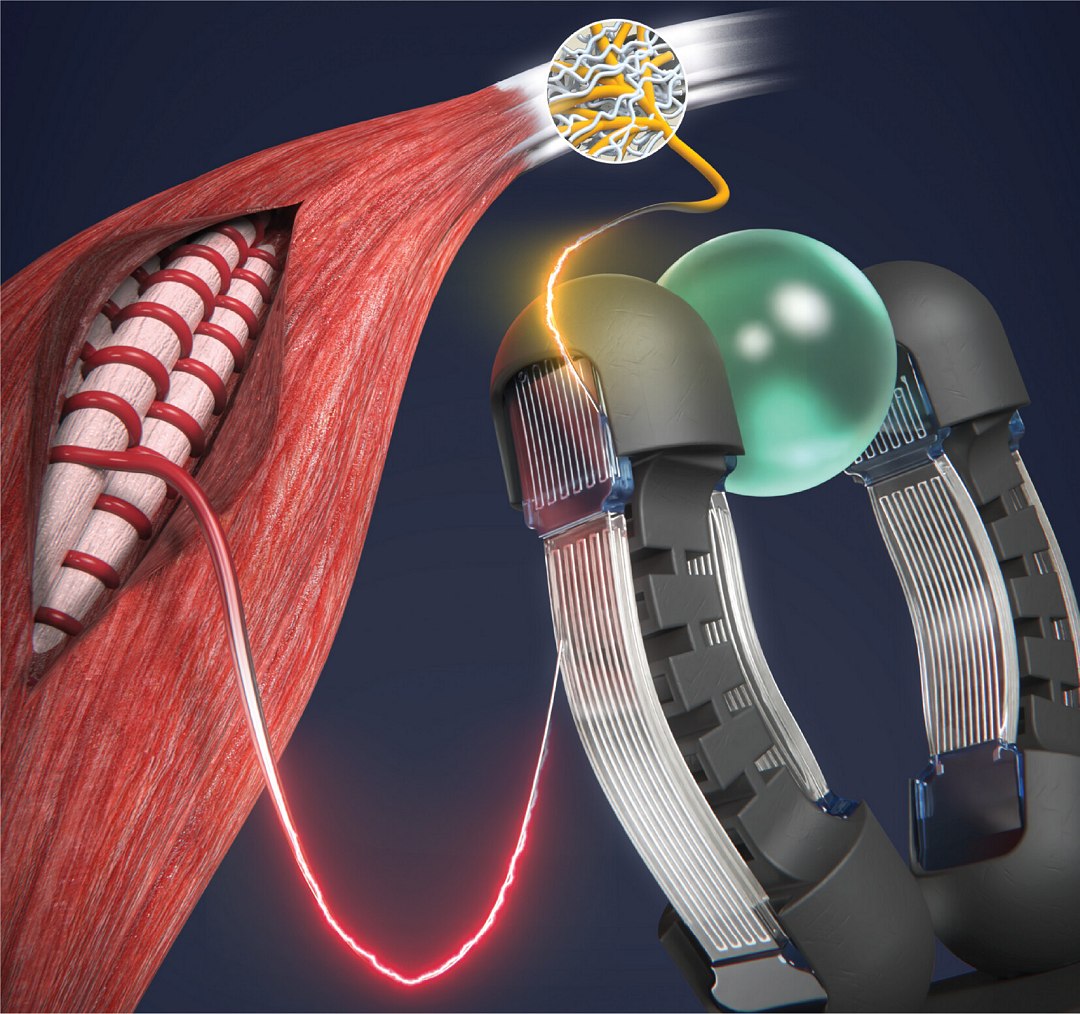
A inovação mereceu a capa da revista onde a pesquisa foi publicada.
[Imagem: Jiyeon Cho et al. – 10.1002/adma.202503094]
Sensor e atuador
Um “músculo artificial inteligente”, inspirado nos complexos músculo-tendão biológicos, consegue realizar simultaneamente funções de sensoriamento (sentir as superfícies tocadas) e atuação (movimentar-se ou mover os objetos tocados).
Tem havido uma demanda crescente por tecnologias de atuadores robóticos capazes de manipular objetos com delicadeza, perceber os ambientes e interagir de forma segura e semelhante à humana. Diversos setores, da robótica humanoide e dos sistemas de automação industrial até dispositivos médicos de reabilitação e tecnologia assistiva precisam dessas capacidades simultaneamente.
Contudo, os músculos artificiais e atuadores robóticos convencionais apresentam limitações sobretudo porque as funções de atuação e sensoriamento são separadas, exigindo sensores adicionais e sistemas de controle complexos.
Para superar essas limitações, Jiyeon Cho e colegas da Universidade Nacional de Seul, na Coreia do Sul, criaram uma nova classe de materiais de atuação biomiméticos incorporando canais de metal líquido em um elastômero de cristal líquido (ECL).
“O músculo artificial desenvolvido neste estudo replica a estrutura e a função únicas dos músculos biológicos, permitindo que os robôs interajam com o ambiente ao seu redor de maneira mais flexível e sensível. Esperamos que ele encontre ampla aplicação em robôs humanoides, bem como nas áreas médica, de reabilitação e de robótica flexível,” disse o professor Yong-Lae Park.
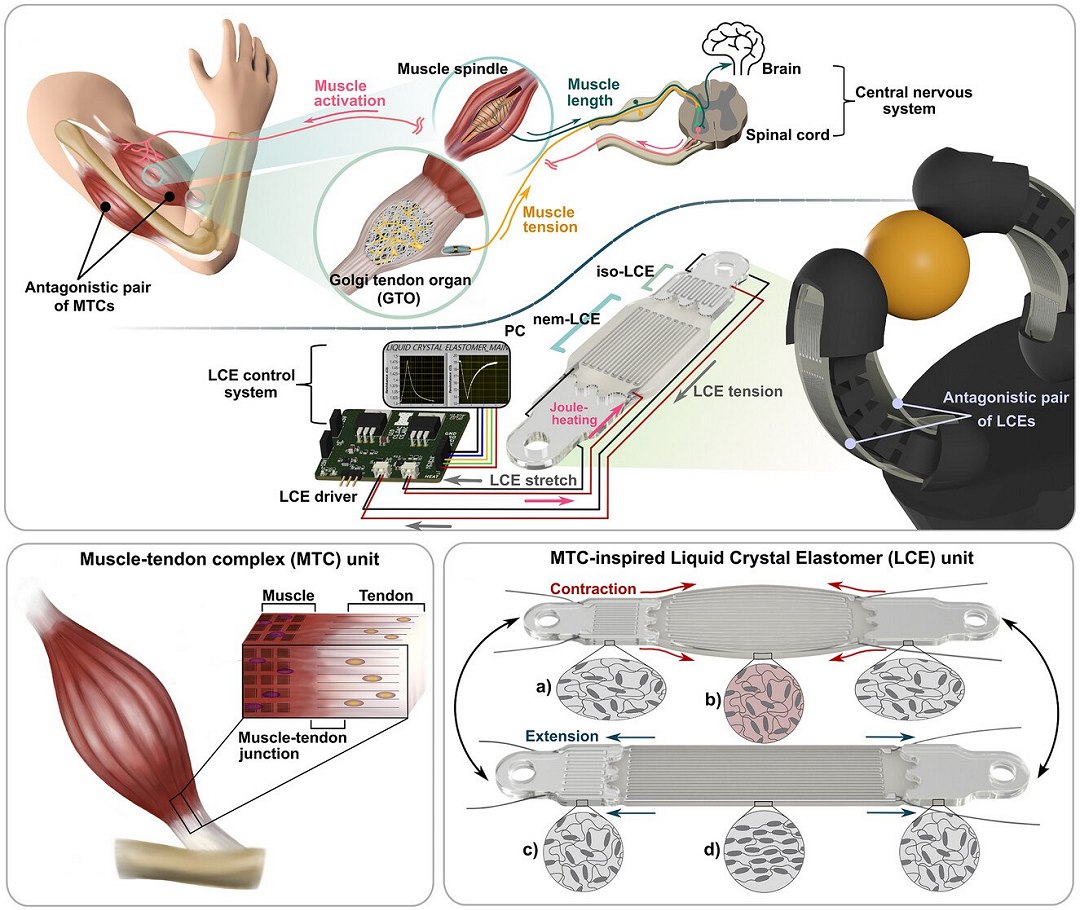
Princípio de funcionamento e demonstrações do músculo artificial inteligente.
[Imagem: Jiyeon Cho et al. – 10.1002/adma.202503094]
Músculo artificial com sensibilidade
O músculo artificial inteligente consiste em uma estrutura integrada na qual elastômeros com diferentes propriedades são conectados em série, desempenhando as funções de tendão e músculo, respectivamente . Um dos elastômeros é isotrópico, o que significa que as propriedades do material são idênticas em todas as direções, enquanto o outro elastômero é nemático, o que significa que suas moléculas estão alinhadas em uma direção específica.
Consequentemente, o ECL (elastômero de cristal líquido) isotrópico apresenta propriedades semelhantes independentemente da direção, enquanto o ECL nemático pode apresentar maior deformação ou resposta na direção do seu alinhamento molecular. A integração dos dois garante uma atuação omnidirecional, mas que é especialmente forte num sentido preferencial.
Dois canais de metal líquido atravessam os elastômeros, um funcionando como um atuador (motor), que induz a contração por meio de aquecimento, enquanto o outro serve como um sensor, detectando com precisão a força e a deformação. Isso dispensa sensores e controles eletrônicos externos, com o sistema gerando movimento e detectando o estado de contração simultaneamente. O músculo se contrai em resposta a uma estimulação elétrica, medindo a força e o comprimento internos em tempo real.
Em outras palavras, o músculo artificial permite o processamento simultâneo de sinais motores (sistema nervoso somático) e sensoriais (sistema nervoso sensorial), de forma semelhante aos músculos biológicos.
É uma tecnologia inovadora, com grande potencial de aplicação em robôs humanoides de próxima geração. As demonstrações incluíram dedos robóticos e sistemas de pinças capazes de agarrar objetos delicadamente e distinguir sua rigidez e tamanho de forma autônoma. Em particular, ao configurar dois músculos artificiais como um par antagônico operando em direções opostas, como nos animais, o sistema alcançou um controle preciso de contração e relaxamento, permitindo uma atuação rápida e precisa.
Artigo: Bio-Inspired Artificial Muscle-Tendon Complex of Liquid Crystal Elastomer for Bidirectional Afferent-Efferent Signaling
Autores: Jiyeon Cho, Minhee Lee, Taejun Park, Yang Wang, Howon Lee, Shengqiang Cai, Yong-Lae Park
Revista: Advanced Materials
DOI: 10.1002/adma.202503094

Outras notícias sobre:






{kind=link}
Deixe um comentário