




Robótica
Redação do Site Inovação Tecnológica – 08/09/2025
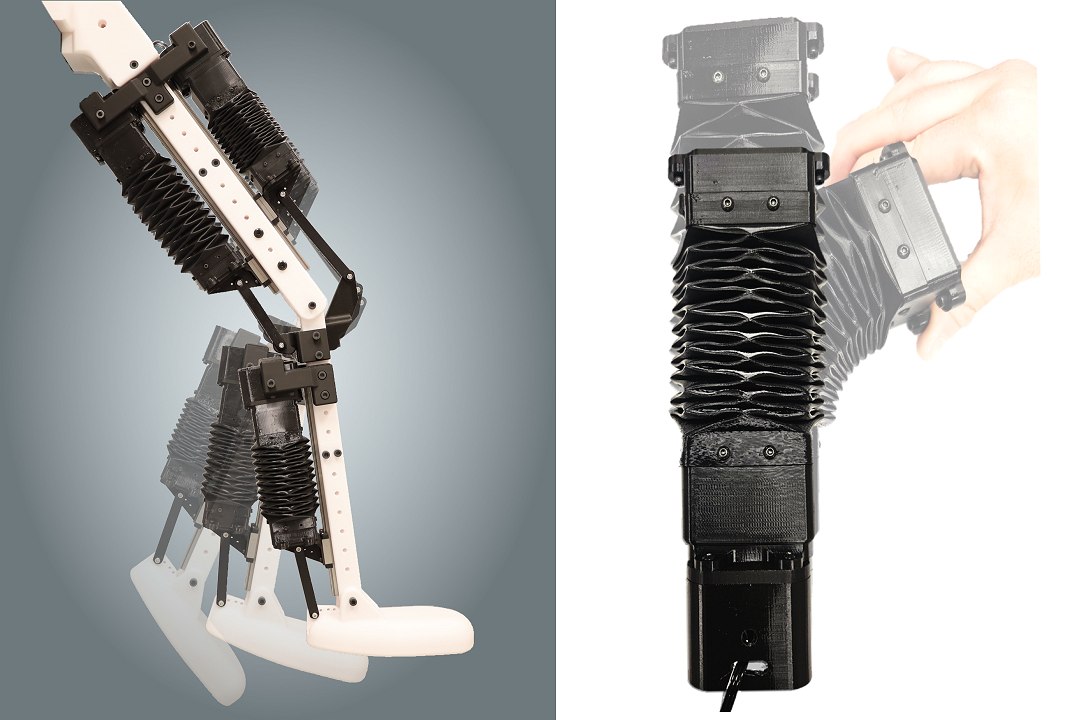
Um protótipo de perna robótica – com músculos artificiais integrados – dobrando no tornozelo e no joelho.
[Imagem: Ryan Truby/Taekyoung Kim/Northwestern University]
Músculo artificial biônico
Um novo tipo de músculo artificial macio e biomimético promete abrir caminho para a construção de robôs em escala animal e humana.
Os novos músculos – ou atuadores – proporcionam o desempenho e as propriedades mecânicas necessárias para a construção de sistemas musculoesqueléticos robóticos, incluindo próteses para uso médico.
Esses novos materiais bioinspirados podem mudar a maneira como os robôs andam, correm, interagem com humanos e navegam pelo mundo ao seu redor.
Para demonstrar as capacidades do músculo artificial, Taekyoung Kim e colegas da Universidade Northwestern, nos EUA, construíram uma perna humanoide em tamanho real, completa, incluindo “ossos” de plástico rígido, tendões elásticos e até mesmo um sensor que permite à prótese biônica sentir seus movimentos.
A perna utiliza três músculos artificiais – um quadríceps, um posterior da coxa e uma panturrilha – para flexionar as articulações do joelho e do tornozelo. Os músculos são flexíveis o suficiente para absorver impactos, mas com capacidade para aplicar força e movimento suficientes para chutar uma bola.
“É difícil fazer com que robôs sem conformidade física respondam ou se adaptem suavemente a mudanças externas e interajam com segurança com humanos,” disse Kim. “Para que os robôs do futuro se movam de forma mais natural e segura em ambientes não estruturados, precisamos projetá-los mais parecidos com corpos humanos – com esqueletos rígidos e atuadores macios, semelhantes a músculos.”

Além de robôs, a tecnologia terá uso amplo nas próteses biomédicas.
[Imagem: Taekyoung Kim et al. – 10.1002/adma.202501290]
Atuadores macios
Os atuadores macios, com propriedades mecânicas semelhantes às dos músculos, têm sido alvo de grande interesse porque permitem construir equipamentos mais leves, com menor consumo de energia e mais compatíveis não apenas com a convivência com os humanos, mas também com a integração ao corpo humano.
A abordagem usada pela equipe emprega um atuador cilíndrico impresso em 3D, uma estrutura chamada de “auxético de cisalhamento manual”, que permite movimentos e propriedades únicas, como estender e expandir quando torcido. O movimento de torção necessário para mover a estrutura pode ser gerado por um pequeno motor elétrico integrado.
Kim desenvolveu ainda um método de impressão 3D dessas estruturas, usando uma borracha comum e barata, frequentemente usada em capas de celulares. O material foi então usado para construir uma estrutura em formato de fole, que permite que o motor rotativo acione a extensão e a contração dos atuadores.
Esses atuadores empurram e puxam com força impressionante, atuando como músculos artificiais. O músculo pode até mesmo enrijecer dinamicamente quando acionado, assim como um músculo humano. Foi uma melhoria substancial em relação aos protótipos anteriores da equipe, que vem trabalhando em músculos artificiais para robôs há alguns anos.

Detalhes da implementação da perna biônica.
[Imagem: Taekyoung Kim et al. – 10.1002/adma.202501290]
Músculo artificial ossificado
Para demonstrar o potencial real do músculo, a equipe usou a impressão 3D para imitar os ossos da perna usando plástico rígido. Conectores inspirados nos tendões, feitos de borracha, conectam os músculos quadríceps e isquiotibiais ao osso da canela e o músculo da panturrilha à estrutura do pé. Os tendões e músculos ajudaram a amortecer os movimentos e absorver choques, de forma semelhante a um sistema musculoesquelético biológico.
Cada conjunto músculo-esquelético pesa aproximadamente o mesmo que uma bola de futebol e é ligeiramente maior do que uma lata de refrigerante. Ele pode se esticar até 30% do seu comprimento e levantar objetos 17 vezes mais pesados do que ele mesmo.
Mas talvez o mais crucial para seu uso em corpos robóticos e próteses seja o fato de o músculo poder ser alimentado por uma bateria, dispensando a necessidade de equipamentos externos pesados.
“Ao desenvolver novos materiais para robótica com o desempenho e as propriedades dos sistemas musculoesqueléticos biológicos, podemos construir robôs mais resilientes e robustos para uso no mundo real,” disse o professor Ryan Truby. “Estamos entusiasmados para ver como esses músculos artificiais poderão impulsionar novos rumos para robôs humanoides e semelhantes a animais.”
Artigo: Architected Soft Actuators for Artificial Musculoskeletal Systems
Autores: Taekyoung Kim, Eliot A. Dunn, Melinda Chen, Ryan L. Truby
Revista: Advanced Materials
DOI: 10.1002/adma.202501290

Outras notícias sobre:











{kind=link}
Deixe um comentário